|
BattleBots
Season 3.0, May 2001 Treasure Island, San Francisco |
|||||
| Tuesday: May 22 | We arive at 8:00am and wait for 2 hours for registration to begin. We are 4th in line to register and then 10th in line for the safety inspection an weigh in. The safety inspection was a breeze and the only thing they wanted was some tape on a terminal block. By 12:00 we are out of there and spend the rest of the day in the city. | ||||
| Wednesday: May 23 | We arrive at 8:30am and wait around for an hour and a half to find out we are still done from the day before. We spend the day in China-town and do some testing and code tweaking at the hotel in the evening. | ||||
| Thursday: May 24 | Another day of waiting as we get a "Buy" for our first scheduled match (Our opponent apparently never showed). After an hour wait to get our remote from impound we do our first ground test since getting to town. After a couple minutes of test we find one motor no longer runs in one direction. Testing that night at the hotel uncovers the problem which is fixed for both controllers. | ||||
| Friday: May 25 | Finally on the schedule, we get our remote for a final ground test. We drive and spin and everything looks good. Bernardo wants to hit some objects but I figure if it's going to break, it might as well be in the battle box. In retrospect, I can only wish I had time for full testing in San Diego against a full weight object...Definitely for next season. | ||||
 |
 |
 |
|||
| Preliminary Elimination Matchup | |||||
| "GoPostal" Super Heavyweight: 277 lbs Weapon: Kinetic energy, spinning hammers. |
"Phere" Super Heavyweight: 315 lbs Weapon: Spiral wedge design. |
||||
 |
 |
 |
 |
||
| At the Event | |||||
 On the Schedule |
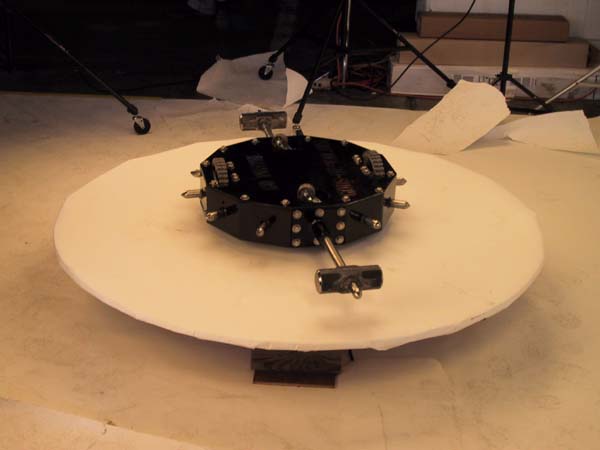 '3d' turntable #1 |
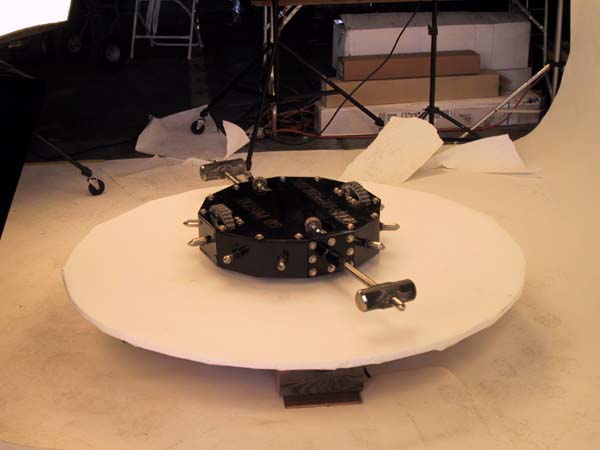 '3d' turntable #2 |
 '3d' turntable #3 |
||
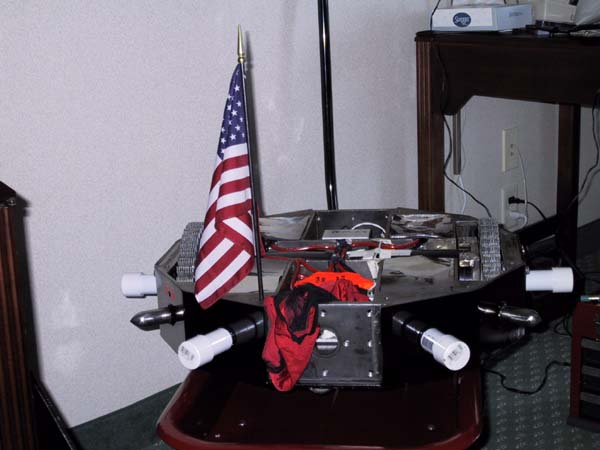 Good luck and Patriotism! |
|
|
|||
| After the battle! | |||||
|
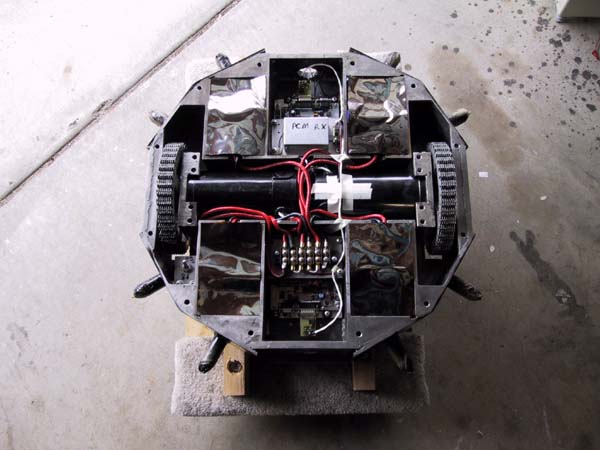
The 10 lb hammer heads were connected to the body with 1 inch diameter hardenned drill rod welded through and secured to the body with a CR steel sleeve welded into a 1/2 inch CR steel mounting plate. The plate is bolted to the body (Another 1/2 inch CR steel plate) with 8 3/8-16 stainless bolts. The purpose of this construction was to put the entire weight of the body of the robot (277 lbs) behind the hammers to deliver the maximum force possible. As can be seen from the photos below, this was accomplished a fraction of a second after the first contact with Phere. I drove accross the arena at full speed and spun GoPostal up to it's 1000rpm (140mph at the hammer faces) within 3-4 seconds after positioning myself in the opponents blue square. Phere and GoPostal contacted and the impact snapped both hammers off, throwing them across the battle box floor. Amazingly, I still had full drivability of the now hammerless robot (Much less dangerous) and proceeded to drive around and spin for the remainder of the match. Phere seemed to be avoiding me but afterward, in the parking lot, we met the phere team who were trying to figure out what was broken because they had actually become immobile from the massive hit on their machine. The main body and electrical system are still functioning at 100% and the robot is fully drivable. We will be adding a new weapon set to the machine for the next competition that will solve the strength problem and software to the drive system to improve spin-drivability. I just can't wait for season 4.0!!! |
|||||
 |
 Hammer #1 Bent before breaking. |
 First Hammer Hit 0.3" deflection at 8" from the hammer head. |
 Second Hammer Hit 0.05" deflection at 8" from the hammer head. |
||
 |
 |
 |
 |
||
 |
|||||
GoPostal construction |
|||||
 Motor mounts-no ears |
 Motor mount-front |
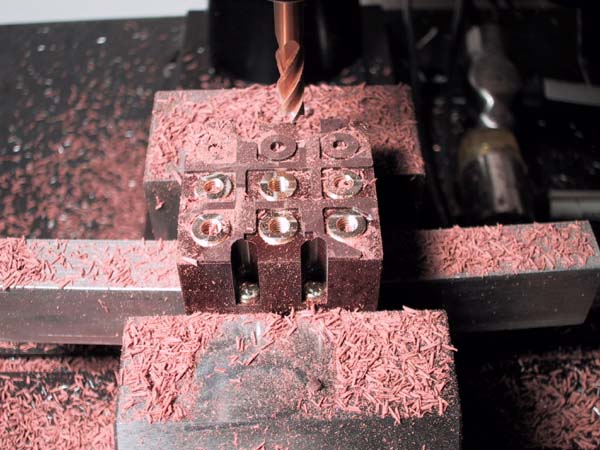
 Hub fixturing |
 Hub Shims |
||
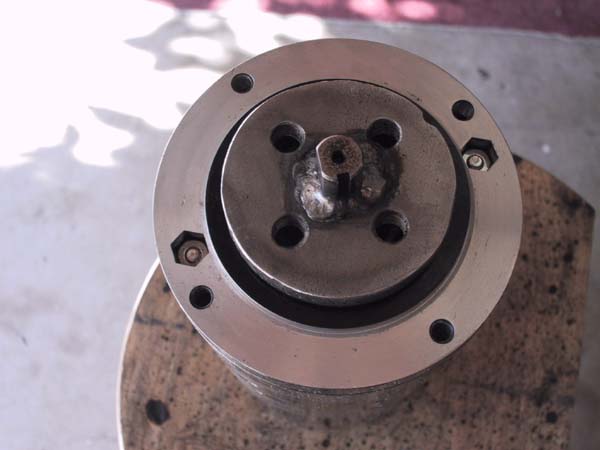 Hub welded to shaft |
 Hub ground flat |
 Motor/Mount front |
 Motor mounts |
||
 Hammer body plates |
 Bits and Pieces |
 Saw blade wheel |
 Wheel in body |
||
 Hammers on body |
Hammers on body |
 Top view |
 Hammer assembly |
||
|
Test fitting |
 Test fitting |
 Motors/Mounts |
 Top view |
||
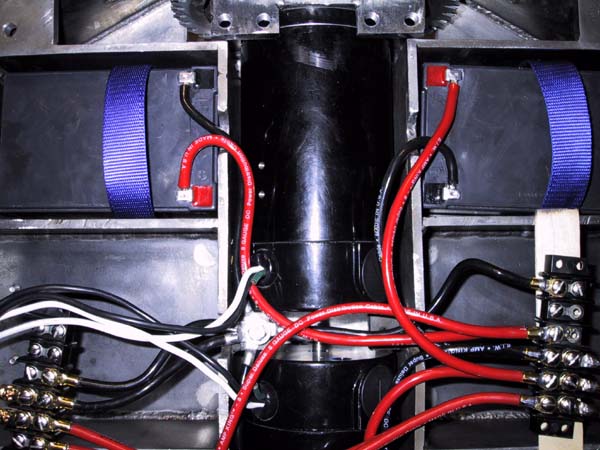 Wiring |
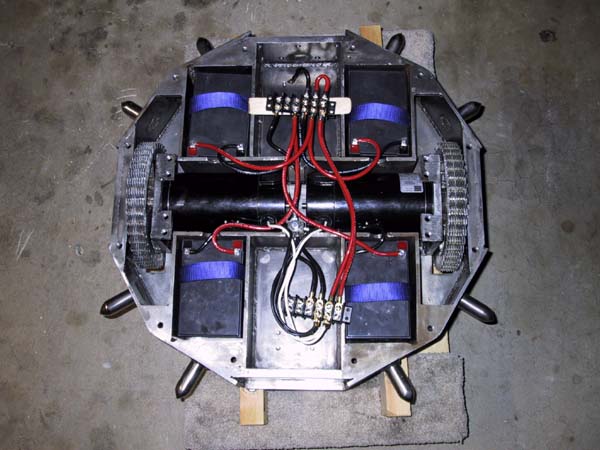 Top view |
 Ready to Go! |
 Cable routing |
||
 Kill switch (Prep for bus-bars) |
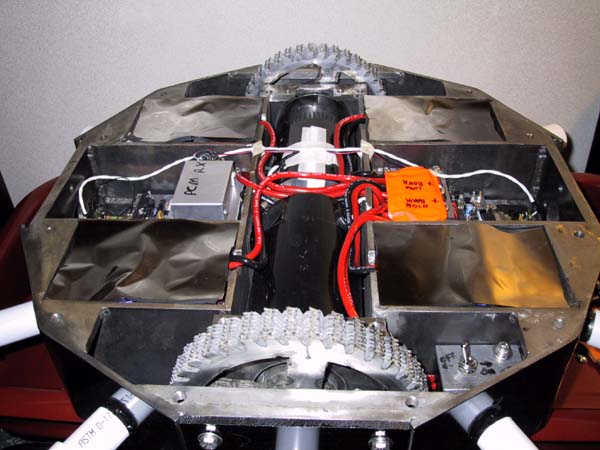 Top view |
 Side view |
|||